العقل الالكتروني ( المعالج )
القطعة الاهم وهي بمثابة الروبوت نفسه سميت بالمعالج ، فهي تتحكم بالروبوت والحساسات وجميع منافذ الحساسات والمحركات يتم توصيلها لهذه القطعة والبرمجة تكون لهذه القطعة ، بدون هذه القطعة لا نستطيع عمل الروبوت.
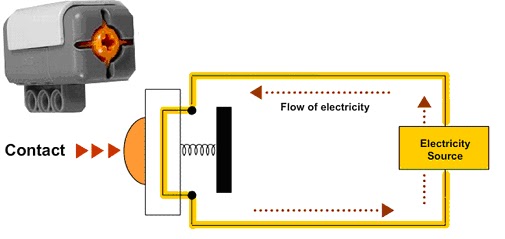
هو جهاز كممبيوتر على شكل الطوب يسمى المعالج الذكي يحتوى على اربعة مداخل للحساسات ، وثلاثة مداخل للمحركات يتم توصيلها غن طريق الاسلاك RJ 12 ، والتى تشبه الى حد كبير اسلاك الهاتف RJ 11 ولاكنها لا تتوافق معها في التوصيل ، ويحتوى كذالك على شاشه عرض 64*100 بكسل بتقنية الكريستال السائل ، واربعة ازرار التى يمكن استخدامها للتنقل بين القوائم ،ويوجد سماعة للصوت لتمكين الروبوت من التحدث وكذالك يمكن تشغيل ملفات الصوت بتردد يصل الى 8 كيلو هرتز ، وهناك مصدرين للطاقة الكهربائيه المستخدمة ومقدارها 9 فولت تيار مستمر عن طريق 6 بطاريات مقاس AA 1.5 V DC او بواسطة بطارية ليثيوم القابلة للشحن .
اولا في هذه القطعة البالغة الاهمية كما ذكرت .. كما نرى يوجد هناك اربع فتحات في اسفلها ومرقمة 1 ، 2 ، 3 ، 4 وايضا يوجد بالاعلى كما نرى في الصورة الاحرفA, B , C . كما نرى ايضا كلمة USB .
في كل من هذه الاحرف والارقام . هناك اماكن لتركيب الحساسات والمحركات .
اولا نقوم بتصميم الروبوت كاملا من حيث الشكل . اما تركيب المحركات والحساسات ، فبالطريقة التالية :
الارقام 1،2،3،4 ، كما ذكرنا هي منافذ ، هذه المنافذ الخاصة بتركيب الحساسات أي انك يجب ان تضع سلكاً في أي واحد من هذه الارقام . ثم تقوم بتركيب هذا السلك من الطرف الاخر بالحساس .
الحد الاقصى للحساسات التي يمكن تركيبها مرة واحدة هي 4 حساسات .
اما بالنسبة للاحرف A , B , C
فهي منافذ خاصة بالمحركات ، حيث نستطيع ربط المحركات بهذه المنافذ ، والطريقة هي نفس طريقة تركيب الحساس ، نقوم بتوصيل جزء من السلك بمنفذ من المنافذ الثلاثة ، والطرف الاخر نقوم بتركيبه بالمحرك .
والحد الاقصى بالتأكيد لعدد المحركات هي 3 محركات .
أما بالنسبة لمنفذ USB
فهذا المنفذ من خلال سلك مميز موجود في علبة الروبوت هذا السلك طرفه الاول نقوم بربطه بالروبوت والطرف الثاني الذي هو عبارة عن USB نقوم بتركيبه في جهاز الكمبيوتر ، ومن خلال هذا الربط نستطيع برمجة الروبوت .
الروبت يعمل على طاقة البطاريات ، ويمكن شحنه ايضا من خلال محول موجود في العلبة الخاصة به .
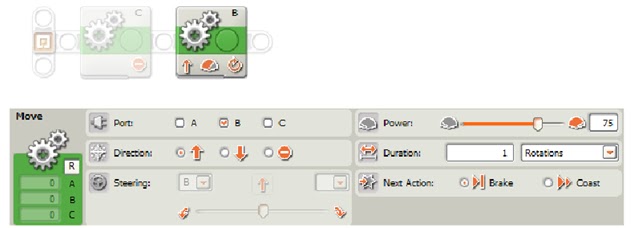
بعد ان نقوم بتركيب كامل المعدات الخاصة بالروبوت وتركيب الروبوت والحساسات والمحركات ننتقل الى قسم البرمجة .
لغات البرمجه
البرنامج الخاص بالمعالج الذكي .
اصدرت ليغو العديد من البرامج الخاصة بالمعالج الذكي والتى تتيح له التخاطب والتواصل مع العديد من لغات البرمجة ، ولكل لغة برمجة البرنامج الخاص بها ، والتى يتم تحميله داخل المعالج الذكي لكى يستطيع التخاطب والتواصل معه .
البرامج الخاصة بلغات البرمجة
برامج بسيطة جدا يمكن انشاؤها باستخدام القائمة الموجودة بالمعالج الذكي ، ويمكن تحميل برامج اكثر تغقيدا وملفات الصوت باستخدام منفذ الناقل التسلسلي العام USB او لاسلكيا باستخدام تقنية البلوتوث ، ويمكن ايضا نسخ ملفات بين اثنين من المعالج الذكي لاسلكيا ، ويمكن استخدام بعض الهواتف النقالة كجهاز تحكم عن بعد عن طريق البلوتوث .
الاصدار الاخير من البرنامج وتشمل هذه المجموعة لكتابة البرامج التى تعمل على اجهزه كمبيوتر ويندو وماكنتوش الشخصية .
وهناك العديد من لغات البرمجة المستخدمه لبرمجة الروبوت على سبيل المثال :
1 – اسم البرنامج : NBC
نوع اللغة : Assembly
بيئة نظام التشغيل : Windows و Mac و Linux
المستهدفين : المبرمجين المحترفين
2- اسم البرنامج : NXC
نوع اللغة : " not exactly " C
بيئة نظام التشغيل : Windows و Mac و Linux
المستهدفين : مبرمجين C
3- اسم البرنامج : RobotC
نوع اللغة : C
بيئة نظام التشغيل : Windows
المستهدفين : مبرمجين C
4- اسم البرنامج : NI LabVIEW Toolkit
نوع اللغة : Graphic " رسومي "
بيئة نظام التشغيل : Windows و Mac
المستهدفين : مطورين NXT-G